
Автомобиль, повернись:
Существуют несколько разновидностей конечного автомата. Здесь мы рассмотрим две из них — автомат Мура и автомат Мили.
В автомате Мура значения выходных параметров однозначно определяются состоянием, в котором он находится. При этом состояние, в которое он перейдет, однозначно определяется текущим состоянием и входной командой. Точнее, конечный автомат Мура характеризуется следующими пятью элементами:
 ,
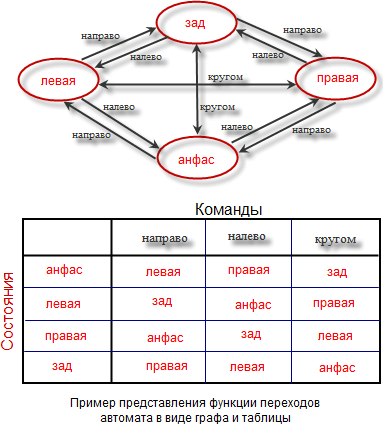
,Функции переходов и выходов обычно представляют таблицами. При небольшом количестве состояний функцию переходов еще представляют в виде графа, вершинам которого соответствуют состояния автомата, а направленным дугам, помеченным командами, — собственно переходы.
Автомат Мили отличается от автомата Мура только функцией выхода, которая определена на множестве всех пар состояние-команда. Точнее, out(c,x) определяет выход автомата, который он будет иметь после подачи на него команды x, если при этом он находился в состоянии c. Любой конечный автомат Мили можно преобразовать в эквивалентный по поведению конечный автомат Мура, и наоборот.
Пусть состояние определяет, какой стороной объект обращен к нам: анфас, левая, правая, зад. Тогда функцию переходов состояний автомата, моделирующего указанное поведение, можно представить в виде графа или таблицы как показано на рисунке справа. Так, если объект находится в состоянии анфас, то при выполнении команды направо он должен показать нам свой левый бок, т.е. перейти в состояние левая. Если повторить ту же команду, то объект перейдет в состояние зад.
В рассматриваемом примере в качестве функции выхода автомата можно взять такую, которая сопоставляет каждому состоянию соответствующее графическое изображение объекта. Возможный вариант показан ниже. Вы можете выбрать команду, щелкнув на соответствующей кнопке, чтобы изменить положение автомобиля.
Функции переходов и выходов можно представить таблицами, а реализовать их программно — с помощью ассоциативных массивов, индексы которых представляются символьными строками, содержащими имена состояний и команд. Далее рассматривается, как это сделать.
var trans=[ ]; // массив переходов состояний автомата trans['анфас']=[ ]; trans['анфас']["направо"]="левая"; trans["анфас"]["налево"]="правая"; trans["анфас"]["кругом"]="зад"; trans['левая']=[ ]; trans["левая"]["направо"]="зад"; trans["левая"]["налево"]="анфас"; trans["левая"]["кругом"]="правая"; trans['правая']=[ ]; trans["правая"]["направо"]="анфас"; trans["правая"]["налево"]="зад"; trans["правая"]["кругом"]="левая"; trans['зад']=[ ]; trans["зад"]["направо"]="правая"; trans["зад"]["налево"]="левая"; trans["зад"]["кругом"]="анфас";Здесь первый индекс массива trans есть имя состояния, второй индекс — имя команды, а значение — имя состояния, в которое должен перейти автомат из состояния, указанного первым индексом, по команде, которая указана вторым индексом.
var out=[ ]; // массив выходов автомата
out["анфас"] =function() {document.getElementById('myimg').src="front.jpg"}
out["левая"] =function() {document.getElementById('myimg').src="left.jpg"}
out["правая"]=function() {document.getElementById('myimg').src="right.jpg"}
out["зад"] =function() {document.getElementById('myimg').src="back.jpg"}
function automat(trans,out,stat){ // движок автомата
this.trans=trans; // массив переходов
this.out=out; // массив выходов
this.stat=stat; // текущее состояние
this.input=function(inp){ // ввод команд
if (inp){
this.stat=this.trans[this.stat][inp];
this.output=out[this.stat] // выход
}
return this.stat
}
this.output=out[this.stat];// выход
}
Ниже приведен скрипт, в котором создается экземпляр объекта automat с переходами trans и выходами out, установленный в начальное состояние "анфас".
Затем выдается команда "налево" и вычисляется выход (в данном случае — функция для состояния "правая").
myautomat=new automat(trans,out,"анфас") // создание экземпляра объекта automat
myautomat.input("налево") // выдача команды
myautomat.output() // вычисление выхода
На автомат можно подать последовательность из нескольких команд, а затем вычислить выход для конечного состояния. Например:
myautomat.input("налево");myautomat.input("налево");myautomat.input("налево");
myautomat.output()
На данной странице изображение автомобиля изменяется при щелчке на одной из трех кнопок. Вот соответствующий код:
<input type="button" value="направо"
onclick="myautomat.input(this.value);myautomat.output()"/>
<input type="button" value="налево"
onclick="myautomat.input(this.value);myautomat.output()"/>
<input type="button" value="кругом"
onclick="myautomat.input(this.value);myautomat.output()"/>
Если требуется вычислять выходы при каждой выдаче команды, то вызов метода output() можно встроить в вызов метода input(),
изменив код объекта automat, например, следующим образом:
function automat(trans,out,stat){ // движок автомата
this.trans=trans; // массив переходов
this.out=out; // массив выходов
this.stat=stat; // текущее состояние
this.input=function(inp){ // ввод команд
if (inp){
this.stat=this.trans[this.stat][inp];
this.output=out[this.stat] // выход
this.output(); // вычисление выхода
}
return this.stat
}
this.output=out[this.stat];// выход
this.output(); // вычисление выхода
}
В данном случае можно не вызывать метод output() отдельно, поскольку он вызывается при выполнении метода input().
var front=function() {document.getElementById('myimg').src="front.jpg"};
var left=function() {document.getElementById('myimg').src="left.jpg"};
var right=function() {document.getElementById('myimg').src="right.jpg"};
var back=function() {document.getElementById('myimg').src="back.jpg"};
out=[]; // массив выходов автомата
out["анфас"]=[];
out["анфас"]['направо']=left;
out["анфас"]['налево']=right;
out["анфас"]['кругом']=back;
out["левая"]=[];
out["левая"]['направо']=back;
out["левая"]['налево']=front;
out["левая"]['кругом']=right;
out["правая"]=[];
out["правая"]['направо']=front;
out["правая"]['налево']=back;
out["правая"]['кругом']=left;
out["зад"]=[];
out["зад"]['направо']=right;
out["зад"]['налево']=left;
out["зад"]['кругом']=front;
function automat2(trans,out,stat){ // движок автомата Мили
this.trans=trans; // массив переходов
this.out=out; // массив выходов
this.stat=stat; // текущее состояние
this.input=function(inp){ // ввод команд
if (inp){
this.output=out[this.stat][inp] // выход
this.output(); // вычисление выхода
this.stat=this.trans[this.stat][inp];
}
return this.stat
}
}
Предложенный в настоящей статье движок может быть, разумеется, доработан. Из возможных дополнений отметим лишь несколько самых важных:
this.input=function(inp){ // ввод команд
if (inp&&this.trans[this.stat][inp]){ ...}
...
}
В движок автомата можно добавить регистрацию обработчиков событий, на которые он должен реагировать как на команды.
Например, для современных браузеров, отличных от IE 8 и более ранних версий, можно использовать стандартный метод
htmlElement.addEventListener(событие, функция-обработчик, false)Для IE 8 и более старых можно использовать метод
htmlElement.attachEvent(событие, функция-обработчик)Возможно, потребуются переменные и/или вспомогательные объекты для хранения промежуточных значений.